scikit-pns documentation#
Principal nested spheres (PNS) analysis [1] for scikit-learn.
The main API classes are IntrinsicPNS and ExtrinsicPNS.
Low-level functions are available in skpns.pns.
Jung, Sungkyu, Ian L. Dryden, and James Stephen Marron. “Analysis of principal nested spheres.” Biometrika 99.3 (2012): 551-568.
Installation#
scikit-pns can be installed using pip:
pip install scikit-pns
Quickstart#
scikit-pns is imported as skpns.
from skpns import IntrinsicPNS
from skpns.util import circular_data
X = circular_data()
X_new = IntrinsicPNS().fit_transform(X)
ONNX support#
Transformers can be converted to ONNX models.
Note
To use this feature, you need to install scikit-pns with [onnx] optional dependency:
pip install scikit-pns[onnx]
import numpy as np
from skpns import ExtrinsicPNS, IntrinsicPNS
from skpns.util import circular_data
from skl2onnx import to_onnx
import matplotlib.pyplot as plt
# Train and save model
X = circular_data().astype(np.float32) # Must be float32
int_pns = IntrinsicPNS(2).fit(X)
with open("int_pns.onnx", "wb") as f:
f.write(to_onnx(int_pns, X[:1]).SerializeToString())
ext_pns = ExtrinsicPNS(2).fit(X)
with open("ext_pns.onnx", "wb") as f:
f.write(to_onnx(ext_pns, X[:1]).SerializeToString())
# Load model
import onnxruntime as rt
ext_sess = rt.InferenceSession("ext_pns.onnx", providers=["CPUExecutionProvider"])
ext_onnx = ext_sess.run([ext_sess.get_outputs()[0].name], {ext_sess.get_inputs()[0].name: X})[0]
int_sess = rt.InferenceSession("int_pns.onnx", providers=["CPUExecutionProvider"])
int_onnx = int_sess.run([int_sess.get_outputs()[0].name], {int_sess.get_inputs()[0].name: X})[0]
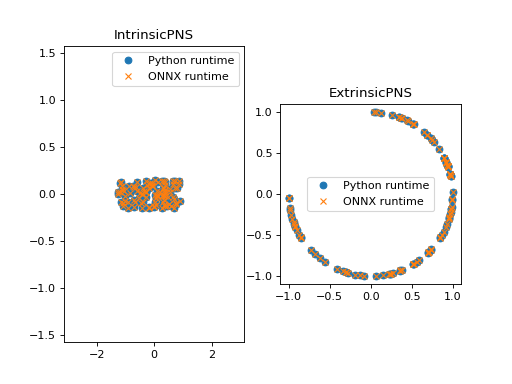
fig = plt.figure()
ax1 = fig.add_subplot(121)
ax1.plot(*int_pns.transform(X).T, "o", label="Python runtime")
ax1.plot(*int_onnx.T, "x", label="ONNX runtime")
ax1.set_xlim(-np.pi, np.pi)
ax1.set_ylim(-np.pi / 2, np.pi / 2)
ax1.legend()
ax1.set_title("IntrinsicPNS")
ax2 = fig.add_subplot(122)
ax2.plot(*ext_pns.transform(X).T, "o", label="Python runtime")
ax2.plot(*ext_onnx.T, "x", label="ONNX runtime")
ax2.set_aspect("equal")
ax2.legend()
ax2.set_title("ExtrinsicPNS")
fig.show()
Module reference#
High-level API#
- class skpns.IntrinsicPNS(n_components=None, tol=0.001, maxiter=None)[source]#
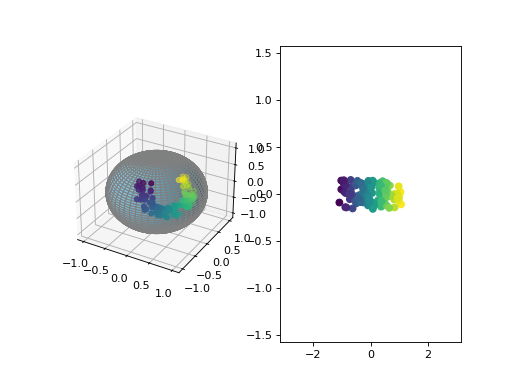
Principal nested spheres (PNS) analysis with intrinsic coordinates.
Reduces the dimensionality of data on a high-dimensional hypersphere while preserving its spherical geometry.
The resulting data are intrinsic Euclidean coordinates, which are the scaled residuals in each dimension. For example, n_components=2 represents data on the surface of a 3D sphere.
- Parameters:
- n_componentsint, default=None
Number of components to keep. Data are transformed onto a Euclidean space in this dimension, representing the surface of a hypersphere with the same dimension. If None, all components are kept, i.e., extrinsic coordinates are converted to intrinsic coordinates without loosing dimenisonality.
- tolfloat, default=1e-3
Optimization tolerance.
- maxiterint, optional
Maximum number of iterations for the optimization. If None, the number of iterations is not checked.
- Attributes:
- embedding_ndarray of shape (n_samples, d)
The embedding vectors, \(\Xi(0), \Xi(1), \ldots, \Xi(d-1)\), where the input data is on d-sphere.
- v_list of arrays
Principal directions of nested spheres, \(\hat{v}_1, \hat{v}_2, \ldots, \hat{v}_d\).
- r_ndarray
Principal radii of nested spheres, \(\hat{r}_1, \hat{r}_2, \ldots, \hat{r}_d\).
Notes
The resulting data is the transposed matrix of
\[\begin{split}\hat{X}_\mathrm{PNS} = \begin{bmatrix} \Xi(0) \\ \Xi(1) \\ \vdots \\ \Xi(n) \end{bmatrix},\end{split}\]with notations in the original paper, where \(n\) is n_components. The coordinates lie in \([-\pi, \pi] \times [-\pi/2, \pi/2]^{n-1}\), i.e., the azimuthal angle is the first coordinate.
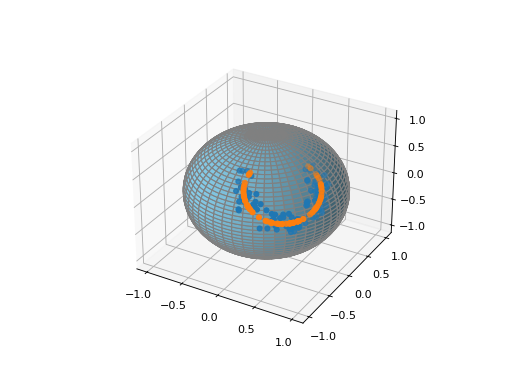
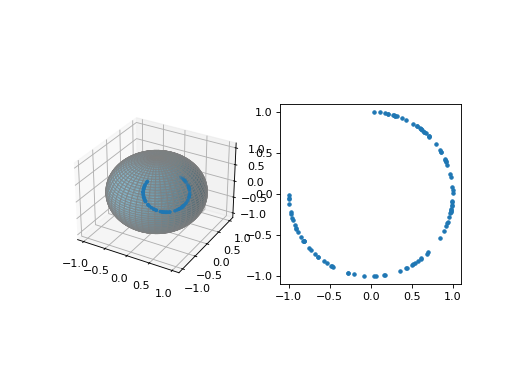
Examples
>>> from skpns import IntrinsicPNS >>> from skpns.util import circular_data, unit_sphere >>> X = circular_data() >>> pns = IntrinsicPNS() >>> Xi = pns.fit_transform(X) >>> import matplotlib.pyplot as plt ... fig = plt.figure() ... ax1 = fig.add_subplot(121, projection='3d', computed_zorder=False) ... ax1.plot_surface(*unit_sphere(), color='skyblue', edgecolor='gray') ... ax1.scatter(*X.T, c=Xi[:, 0]) ... ax2 = fig.add_subplot(122) ... ax2.scatter(*Xi.T, c=Xi[:, 0]) ... ax2.set_xlim(-np.pi, np.pi) ... ax2.set_ylim(-np.pi/2, np.pi/2)
- fit(X, y=None)[source]#
Find principal nested spheres for the data X.
- Parameters:
- Xarray-like of shape (n_samples, n_features)
Data on (n_features - 1)-dimensional hypersphere.
- yIgnored
Not used, present for API consistency by convention.
- Returns:
- selfobject
Returns a fitted instance of self.
- fit_transform(X, y=None)[source]#
Fit the model with data in X and transform X.
- Parameters:
- Xarray-like of shape (n_samples, n_features)
Data on (n_features - 1)-dimensional hypersphere.
- yIgnored
Not used, present for API consistency by convention.
- Returns:
- X_newarray-like, shape (n_samples, n_components)
X transformed in the new space.
- transform(X, y=None)[source]#
Transform X onto the fitted subsphere.
- Parameters:
- Xarray-like of shape (n_samples, n_features)
Data on (n_features - 1)-dimensional hypersphere.
- Returns:
- X_newarray-like, shape (n_samples, n_components)
X transformed in the new space.
- inverse_transform(Xi)[source]#
Transform the low-dimensional data back to the original hypersphere.
- Parameters:
- Xarray-like of shape (n_samples, n_components)
- Returns:
- X_newarray-like of shape (n_samples, n_features)
Examples
>>> from skpns import IntrinsicPNS >>> from skpns.util import circular_data, unit_sphere >>> X = circular_data() >>> pns = IntrinsicPNS(1) >>> Xi = pns.fit_transform(X) >>> X_inv = pns.inverse_transform(Xi) >>> import matplotlib.pyplot as plt ... ax = plt.figure().add_subplot(projection='3d', computed_zorder=False) ... ax.plot_surface(*unit_sphere(), color='skyblue', edgecolor='gray') ... ax.scatter(*X.T) ... ax.scatter(*X_inv.T)
- class skpns.ExtrinsicPNS(n_components=2, tol=0.001, maxiter=None)[source]#
Principal nested spheres (PNS) analysis with extrinsic coordinates.
Reduces the dimensionality of data on a high-dimensional hypersphere while preserving its spherical geometry.
The resulting data are represented by extrinsic coordinates. For example, n_components=2 transforms data onto a 2D unit circle, represented by x and y coordinates.
- Parameters:
- n_componentsint, default=2
Number of components to keep. Data are transformed onto a unit hypersphere embedded in this dimensional space.
- tolfloat, default=1e-3
Optimization tolerance.
- maxiterint, optional
Maximum number of iterations for the optimization. If None, the number of iterations is not checked.
- Attributes:
- embedding_ndarray of shape (n_samples, n_components)
Stores the embedding vectors.
- v_list of (n_features - 1) arrays
Principal directions of nested spheres.
- r_ndarray of shape (n_features - 1,)
Principal radii of nested spheres.
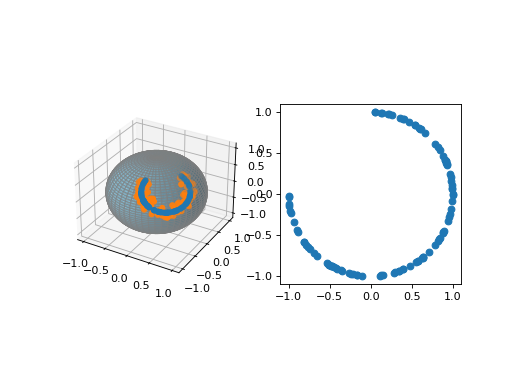
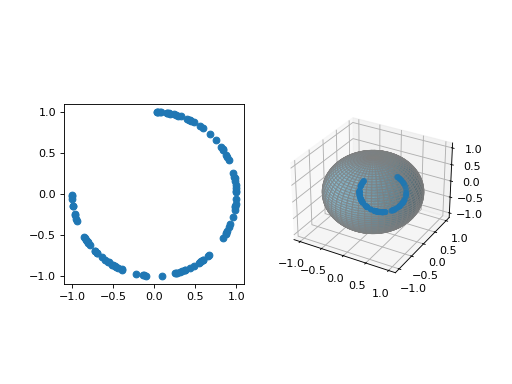
Examples
>>> from skpns import ExtrinsicPNS >>> from skpns.util import circular_data, unit_sphere >>> X = circular_data() >>> pns = ExtrinsicPNS(n_components=2) >>> X_reduced = pns.fit_transform(X) >>> X_inv = pns.inverse_transform(X_reduced) >>> import matplotlib.pyplot as plt ... fig = plt.figure() ... ax1 = fig.add_subplot(121, projection='3d', computed_zorder=False) ... ax1.plot_surface(*unit_sphere(), color='skyblue', alpha=0.6, edgecolor='gray') ... ax1.scatter(*X_inv.T, zorder=10) ... ax1.scatter(*X.T) ... ax2 = fig.add_subplot(122) ... ax2.scatter(*X_reduced.T) ... ax2.set_aspect('equal')
- fit(X, y=None)[source]#
Find principal nested spheres for the data X.
- Parameters:
- Xarray-like of shape (n_samples, n_features)
Data on (n_features - 1)-dimensional hypersphere.
- yIgnored
Not used, present for API consistency by convention.
- Returns:
- selfobject
Returns a fitted instance of self.
- fit_transform(X, y=None)[source]#
Fit the model with data in X and transform X.
- Parameters:
- Xarray-like of shape (n_samples, n_features)
Data on (n_features - 1)-dimensional hypersphere.
- yIgnored
Not used, present for API consistency by convention.
- Returns:
- X_newarray-like, shape (n_samples, n_components)
X transformed in the new space.
- transform(X)[source]#
Transform X onto the fitted subsphere.
- Parameters:
- Xarray-like of shape (n_samples, n_features)
Data on (n_features - 1)-dimensional hypersphere.
- Returns:
- X_newarray-like, shape (n_samples, n_components)
X transformed in the new space.
- inverse_transform(X)[source]#
Transform the low-dimensional data back to the original hypersphere.
- Parameters:
- Xarray-like of shape (n_samples, n_components)
- Returns:
- X_newarray-like of shape (n_samples, n_features)
- to_hypersphere(X)[source]#
Alias for
inverse_transform().
Low-level functions#
Functions for principal nested spheres analysis.
- skpns.pns.pss(x, tol=0.001, maxiter=None)[source]#
Find the principal subsphere from data on a hypersphere.
- Parameters:
- x(N, d+1) real array
Extrinsic coordinates of data on a
d-dimensional hypersphere, embedded in ad+1-dimensional space.- tolfloat, default=1e-3
Convergence tolerance in radian.
- maxiterint, optional
Maximum number of iterations for the optimization. If None, the number of iterations is not checked.
- Returns:
- v(d+1,) real array
Estimated principal axis of the subsphere in extrinsic coordinates.
- rscalar in [0, pi]
Geodesic distance from the pole by v to the estimated principal subsphere.
See also
projProject x onto the found principal subsphere.
Notes
This function determines the best fitting subsphere \(\hat{A}_{d-k} = A_{d-k}(\hat{v}_k, \hat{r}_k) \subset S^{d-k+1}\) for \(k = 1, 2, \ldots, d\).
The Fréchet mean \(\hat{A}_0\) of the lowest level best fitting subsphere \(\hat{A}_1\) is also determined by this function.
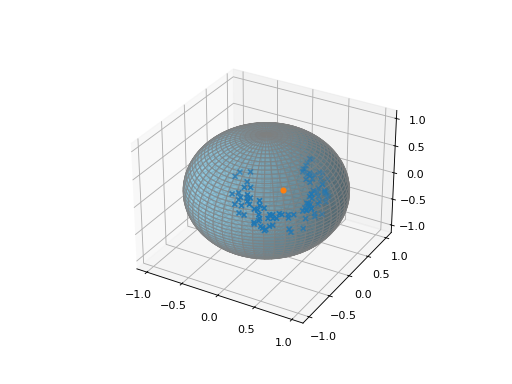
Examples
>>> from skpns.pns import pss >>> from skpns.util import circular_data, unit_sphere >>> x = circular_data() >>> v, _ = pss(x) >>> import matplotlib.pyplot as plt ... ax = plt.figure().add_subplot(projection='3d', computed_zorder=False) ... ax.plot_surface(*unit_sphere(), color='skyblue', alpha=0.6, edgecolor='gray') ... ax.scatter(*x.T, marker="x") ... ax.scatter(*v)
- skpns.pns.proj(x, v, r)[source]#
Minimum-geodesic projection of points to a subsphere.
- Parameters:
- x(N, m+1) real array
Extrinsic coordinates of data on a
d-dimensional hypersphere, embedded in ad+1-dimensional space.- v(m+1,) real array
Subsphere axis.
- rscalar
Subsphere geodesic distance.
- Returns:
- xP(N, m+1) real array
Extrinsic coordinates of data on a
d-dimensional hypersphere, projected onto the found principal subsphere.- res(N, 1) real array
Projection residuals.
See also
Notes
This is the function \(P: S^{d-k+1} \to A_{d-k}(v_k, r_k ) \subset S^{d-k+1}\) for \(k = 1, 2, \ldots, d\) in the original paper. Here, \(A_{d-k}(v_k, r_k)\) is a subsphere of the hypersphere \(S^{d-k+1}\). The input and output data dimension are \(m+1\), where \(m = d-k+1\).
This function projects the data onto any subsphere. To project to the principal subsphere \(\hat{A}_{d-k} = A_{d-k}(\hat{v}_k, \hat{r}_k)\), pass the results from
pss().The resulting points have same number of components but their rank is reduced by one in the manifold. Use
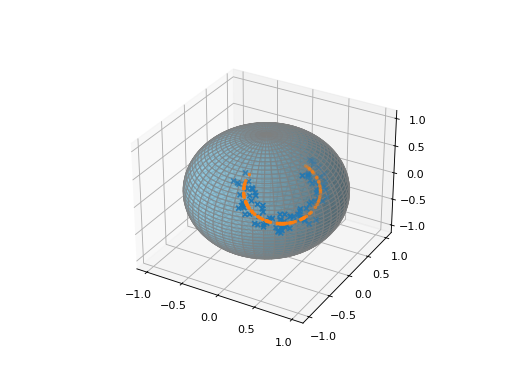
embed()to further map \(x \in A_{d-k}(v_k, r_k) \subset S^{d-k+1}\) to \(x^\dagger \in S^{d-k}\).Examples
>>> from skpns.pns import pss, proj >>> from skpns.util import circular_data, unit_sphere >>> x = circular_data() >>> A, _ = proj(x, *pss(x)) >>> import matplotlib.pyplot as plt ... ax = plt.figure().add_subplot(projection='3d', computed_zorder=False) ... ax.plot_surface(*unit_sphere(), color='skyblue', alpha=0.6, edgecolor='gray') ... ax.scatter(*x.T, marker="x") ... ax.scatter(*A.T, marker=".")
- skpns.pns.embed(x, v, r)[source]#
Embed data on a sub-hypersphere to a low-dimensional unit hypersphere.
- Parameters:
- x(N, m+1) real array
Data \(x \in A_{m-1} \subset S^m \subset \mathbb{R}^{m+1}\), on a subsphere \(A_{m-1}\) of a unit hypersphere \(S^m\).
- v(m+1,) real array
Sub-hypersphere axis.
- rscalar
Sub-hypersphere geodesic distance.
- Returns:
- (N, m) real array
Data \(x^\dagger\) on a low-dimensional unit hypersphere \(S^{m-1}\).
See also
pssFind v and r for the principal subsphere.
projProject data on a principal subsphere.
reconstructInverse operation of this function.
Notes
This is the function \(f_k: A_{d-k}(v_k, r_k) \subset S^{d-k+1} \to S^{d-k}\) for \(k = 1, 2, \ldots, d-1\) in the original paper. Here, \(A_{d-k}(v_k, r_k)\) is a subsphere of the hypersphere \(S^{d-k+1}\). The input is \(x \in S^m \subset \mathbb{R}^{m+1}\) and the output is \(x^\dagger \in S^{m-1} \subset \mathbb{R}^{m}\), where \(m = d-k+1\).
Examples
>>> from skpns.pns import pss, proj, embed >>> from skpns.util import circular_data, unit_sphere >>> x = circular_data() >>> v, r = pss(x) >>> A, _ = proj(x, v, r) >>> A_low = embed(A, v, r) >>> import matplotlib.pyplot as plt ... fig = plt.figure() ... ax1 = fig.add_subplot(121, projection='3d', computed_zorder=False) ... ax1.plot_surface(*unit_sphere(), color='skyblue', alpha=0.6, edgecolor='gray') ... ax1.scatter(*A.T, marker=".", zorder=10) ... ax2 = fig.add_subplot(122) ... ax2.scatter(*A_low.T, marker=".", zorder=10) ... ax2.set_aspect("equal")
- skpns.pns.reconstruct(x, v, r)[source]#
Reconstruct data on a low-dimensional unit hypersphere. to a sub-hypersphere.
- Parameters:
- x(N, m) real array
Data \(x^\dagger\) on a low-dimensional unit hypersphere \(S^{m-1}\).
- v(m+1,) real array
Sub-hypersphere axis.
- rscalar
Sub-hypersphere geodesic distance.
- Returns:
- (N, m+1) real array
Data \(x \in A_{m-1} \subset S^m \subset \mathbb{R}^{m+1}\), on a subsphere \(A_{m-1}\) of a unit hypersphere \(S^m\).
See also
embedInverse operation of this function.
Notes
This is the function \(f^{-1}_k: S^{d-k} \to A_{d-k}(v_k, r_k) \subset S^{d-k+1}\) for \(k = 1, 2, \ldots, d-1\) in the original paper. Here, \(A_{d-k}(v_k, r_k)\) is a subsphere of the hypersphere \(S^{d-k+1}\). The input is \(x^\dagger \in S^{m-1} \subset \mathbb{R}^{m}\) and the output is \(x \in S^m \subset \mathbb{R}^{m+1}\), where \(m = d-k+1\).
Examples
>>> from skpns.pns import reconstruct >>> from skpns.util import circular_data, unit_sphere >>> x = circular_data(dim=2) >>> v = np.array([1 / np.sqrt(3), -1 / np.sqrt(3), 1 / np.sqrt(3)]) >>> r = 0.15 * np.pi >>> x_high = reconstruct(x, v, r) >>> import matplotlib.pyplot as plt ... fig = plt.figure() ... ax1 = fig.add_subplot(121) ... ax1.scatter(*x.T) ... ax1.set_aspect("equal") ... ax2 = fig.add_subplot(122, projection='3d', computed_zorder=False) ... ax2.plot_surface(*unit_sphere(), color='skyblue', alpha=0.6, edgecolor='gray') ... ax2.scatter(*x_high.T)
- skpns.pns.from_unit_sphere(x, v, r)[source]#
alias of
reconstruct().
- skpns.pns.pns(x, tol=0.001, residual='none', maxiter=None)[source]#
Principal nested spheres analysis.
- Parameters:
- x(N, d+1) real array
Data on a d-sphere.
- tolfloat, default=1e-3
Convergence tolerance in radians.
- residual{‘none’, ‘scaled’, ‘unscaled’}
If ‘none’, do not yield residuals. If ‘scaled’, yield scaled residuals \(\Xi\). If ‘unscaled’, yield unscaled residuals \(\xi\).
- maxiterint, optional
Maximum number of iterations for the optimization. If None, the number of iterations is not checked.
- Yields:
- v(d+1-i,) real array
Estimated principal axis \(\hat{v}\).
- rscalar
Estimated principal geodesic distance \(\hat{r}\).
- xd(N, d-i) real array
Transformed data \(x^\dagger\) on low-dimensional unit hypersphere.
- res(N,) real array
Residuals. See the description of parameter residual.
See also
reconstructReconstruct the transformed data onto higher-dimensional spheres.
Notes
The input data is \(x \in S^d \subset \mathbb{R}^{d+1}\).
At \(k\)-th iteration for \(k=1, \ldots, d\), this generator yields:
The principal axis \(\hat{v}_{k} \in S^{d-k+1} \subset \mathbb{R}^{d-k+2}\),
The principal geodesic distance \(\hat{r}_k \in \mathbb{R}\), and
The embedded data \(x_k^\dagger \in S^{d-k} \subset \mathbb{R}^{d-k+1}\).
(Optional) Scaled residual \(\Xi(d-k)\), or unscaled residual \(\xi_{d-k}\).
Data projected onto each principal nested sphere in the original space, \(\hat{\mathfrak{A}}_{d-k} \subset S^d\), can be found by recursively calling
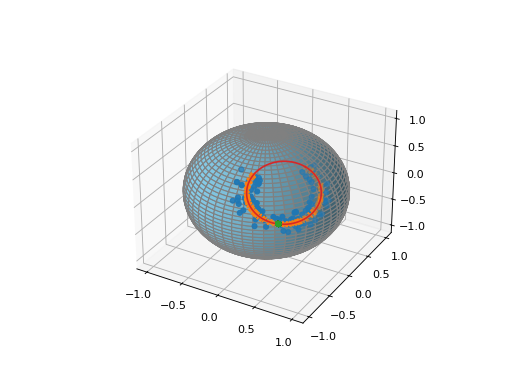
reconstruct()on \(x_k^\dagger\).Examples
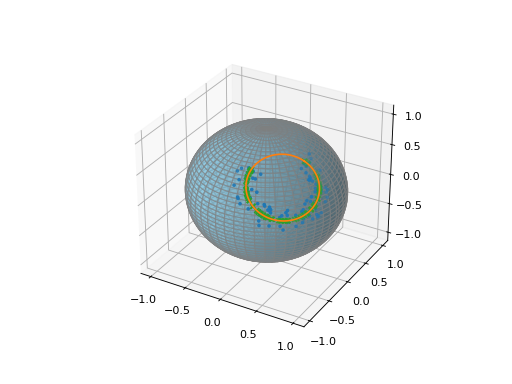
Use
reconstruct()to map reduced data onto the original sphere.>>> from skpns.pns import pns, reconstruct >>> from skpns.util import circular_data, unit_sphere, circle >>> x = circular_data() >>> pns_gen = pns(x, residual="none") >>> v1, r1, xd1 = next(pns_gen) >>> v2, r2, xd2 = next(pns_gen) >>> import matplotlib.pyplot as plt ... ax = plt.figure().add_subplot(projection='3d', computed_zorder=False) ... ax.plot_surface(*unit_sphere(), color='skyblue', edgecolor='gray') ... ax.scatter(*x.T) ... ax.scatter(*reconstruct(xd1, v1, r1).T, marker="x") ... ax.scatter(*reconstruct(reconstruct(xd2, v2, r2), v1, r1).T, zorder=10) ... ax.plot(*circle(v1, r1), color="tab:red")
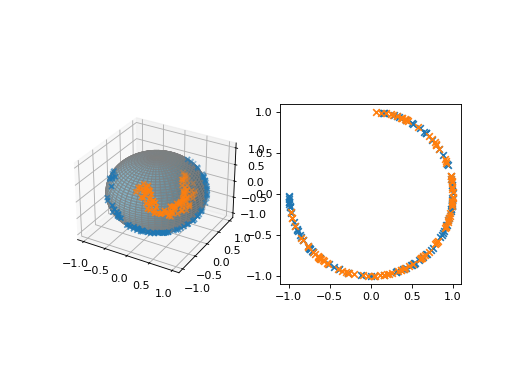
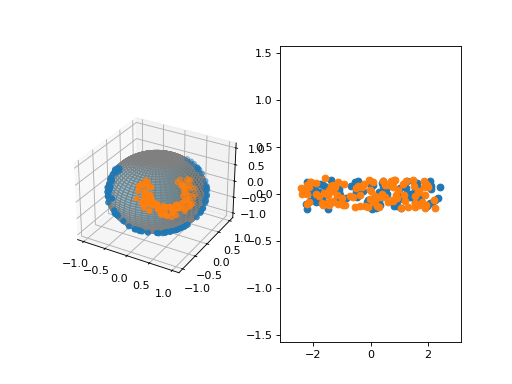
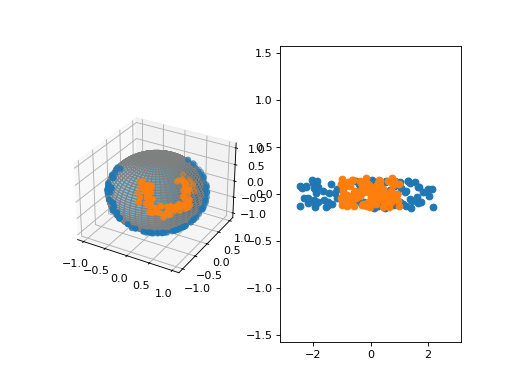
Unscaled residuals do not distinguish the scale of the data on the original sphere.
>>> X = circular_data(scale="large") >>> (V1, R1, XD1, XI1), (V2, R2, XD2, XI2) = list(pns(X, residual="unscaled")) >>> x = circular_data(scale="small") >>> (v1, r1, xd1, xi1), (v2, r2, xd2, xi2) = list(pns(x, residual="unscaled")) >>> fig = plt.figure() ... ax1 = fig.add_subplot(121, projection='3d', computed_zorder=False) ... ax1.plot_surface(*unit_sphere(), color='skyblue', edgecolor='gray') ... ax1.scatter(*X.T) ... ax1.scatter(*x.T) ... ax2 = fig.add_subplot(122) ... ax2.scatter(XI2, XI1) ... ax2.scatter(xi2, xi1) ... ax2.set_xlim(-np.pi, np.pi) ... ax2.set_ylim(-np.pi/2, np.pi/2)
Scaled residuals distinguish different arc-lengths of principal subspheres.
>>> X = circular_data(scale="large") >>> (V1, R1, XD1, XI1), (V2, R2, XD2, XI2) = list(pns(X, residual="scaled")) >>> x = circular_data(scale="small") >>> (v1, r1, xd1, xi1), (v2, r2, xd2, xi2) = list(pns(x, residual="scaled")) >>> fig = plt.figure() ... ax1 = fig.add_subplot(121, projection='3d', computed_zorder=False) ... ax1.plot_surface(*unit_sphere(), color='skyblue', edgecolor='gray') ... ax1.scatter(*X.T) ... ax1.scatter(*x.T) ... ax2 = fig.add_subplot(122) ... ax2.scatter(XI2, XI1) ... ax2.scatter(xi2, xi1) ... ax2.set_xlim(-np.pi, np.pi) ... ax2.set_ylim(-np.pi/2, np.pi/2)
Utilities#
Utility functions for data generation and transformation.
- skpns.util.circular_data(dim=3, scale='small')[source]#
Circular data on a 3D unit sphere, or its projection to 2D unit sphere.
- Parameters:
- dim{3, 2}
Data dimension.
- scale{“small”, “large”}
Size of the circle around the 3D sphere.
- Returns:
- ndarray of shape (100, dim)
Data coordinates.
Examples
Note how data occupy different scales in 3D, but their projection onto each principal subsphere is identical.
>>> from skpns.util import circular_data, unit_sphere >>> import matplotlib.pyplot as plt ... fig = plt.figure() ... ax1 = fig.add_subplot(121, projection='3d', computed_zorder=False) ... ax1.plot_surface(*unit_sphere(), color='skyblue', alpha=0.6, edgecolor='gray') ... ax1.scatter(*circular_data(3, scale="large").T, marker="x") ... ax1.scatter(*circular_data(3, scale="small").T, marker="x") ... ax2 = fig.add_subplot(122) ... ax2.scatter(*circular_data(2, scale="large").T, marker="x") ... ax2.scatter(*circular_data(2, scale="small").T, marker="x") ... ax2.set_aspect("equal")